 | 
Typical Applications- Office Automation
- Instrumentation
- Medical Equipment
- Pumps
- Variable Speed Feeder Equipment
|
|---|
| Model Selection Guide |
| To construct a motor part number substitute the appropriate digits for the X's as shown below. |
|---|
 |
|---|
 |
|---|
| RS232 Interface Kit and Software
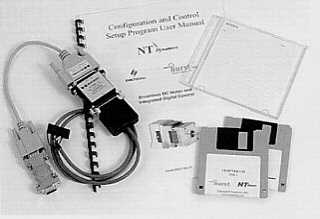
The RS232 Interface Kit and Software package is required to change the factory program settings on the Digital Motor Control or to operate the Dynamo motor using your computers RS232 port. The kit includes: - RS232 to TTL converter
- Converter power supply
- Programming software
- Installation instructions
Hurst Part Number: 120034
|
 |
|---|
|
|---|
| Brushless DC Speed Torque Curves |
|---|
| To view the Speed Torque Curves Click Here |
|---|
Note:
- Performance data shown is typical. More detailed data is available from Beckwith Electronics for each of the above ratings. Ambient operating temperature range: 0 - 40°C.
- The solid portion of the diagonal line is continuous duty and the dotted line represents momentary operation.
- At 25°C ambient the max motor winding operating temperature rise is 65°C with motor mounted to a 2.50" x 2.50" x 0.25" aluminum plate.
|
|
|---|
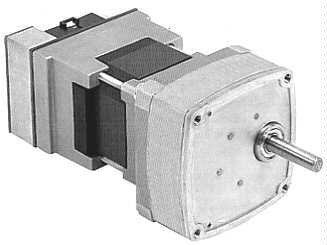
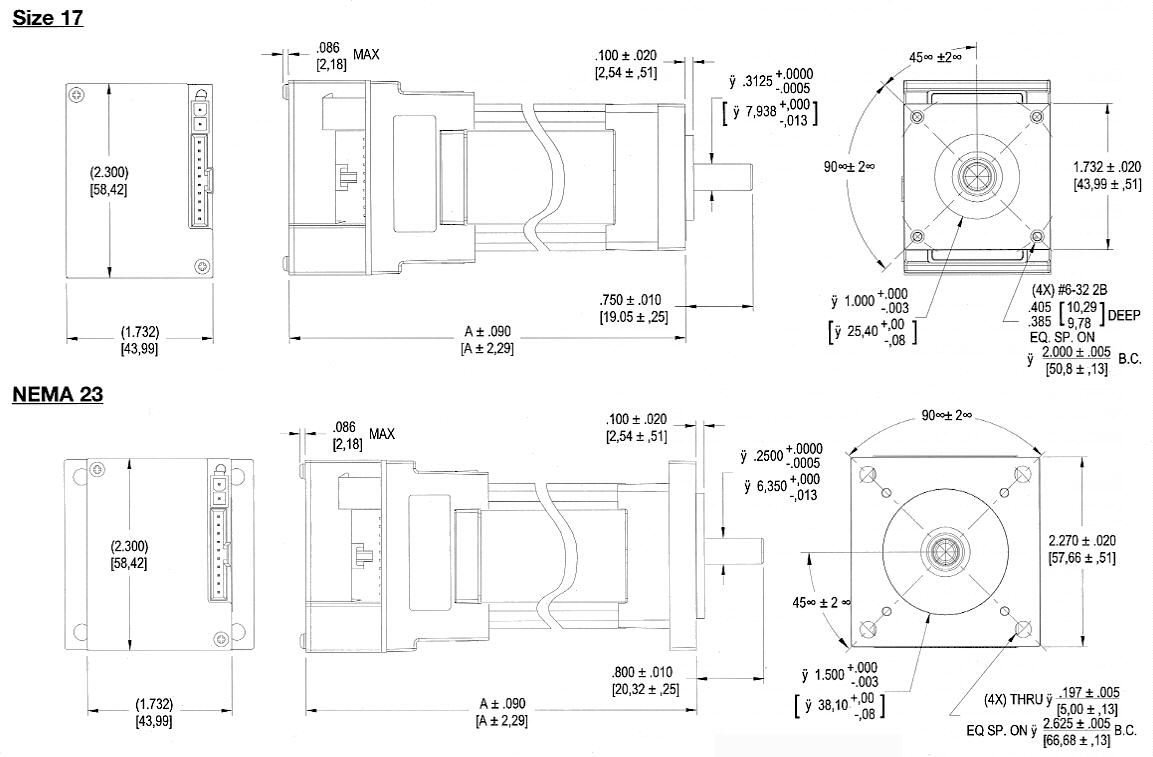
| Brushless DC Mechanical Features |
|---|
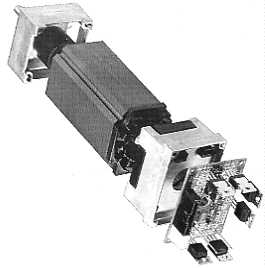
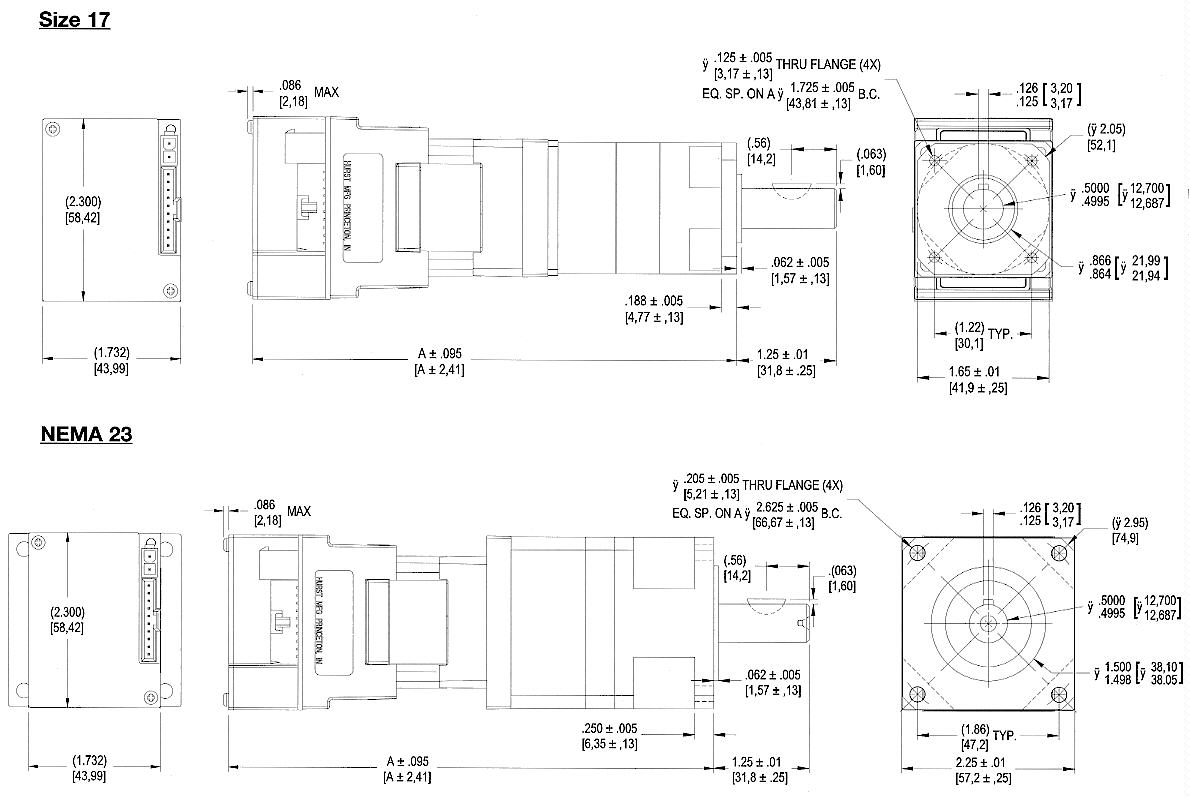
| Size 17 and NEMA 23 Non-Geared Dynamo Motor |
|---|
| Model | A Inches [mm]
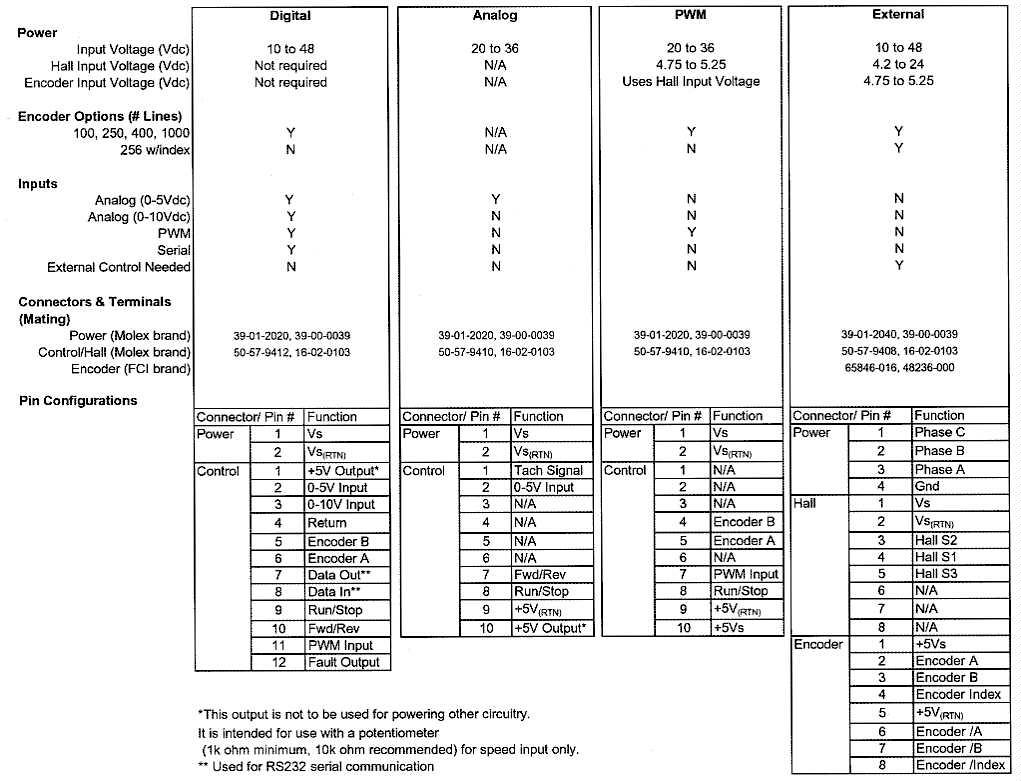
External
Control |
A Inches [mm]
Analog
Control |
A Inches [mm]
PWM
Control |
A Inches [mm]
Digital
Control |
|---|
| 1 | 3.18 [80.8] | 3.79 [96.3] | 3.79 [96.3] | 4.13 [104.9] |
|---|
| 2 | 3.43 [87.1] | 4.04 [102.6] | 4.04 [102.6] | 4.38 [111.3] |
|---|
| 3 | 4.18 [106.2] | 4.79 [121.7] | 4.79 [121.7] | 5.13 [130.3] |
|---|
| 4, 5, & 6 | 5.68 [144.3] | 6.29 [159.7] | 6.29 [159.7] | 6.63 [168.4] |
|---|
|
|---|
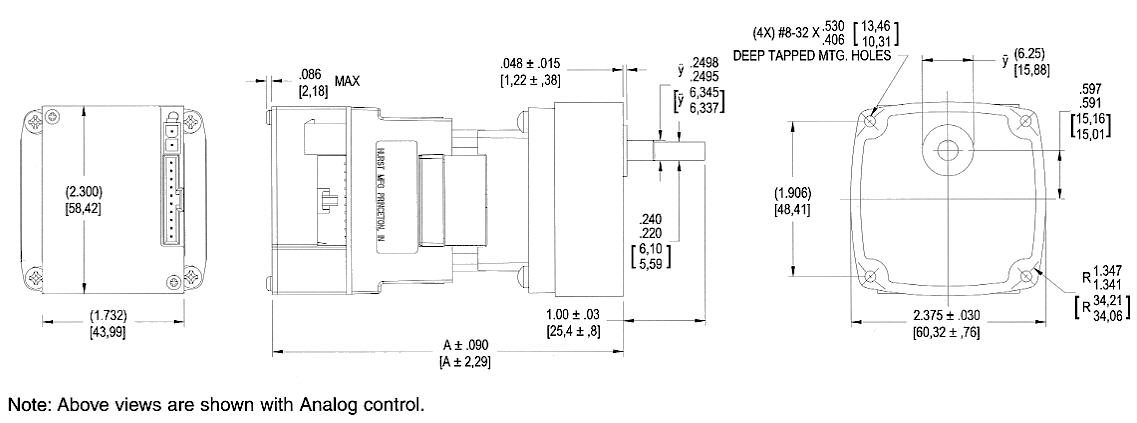
| To view the Mechanical Motor Drawings Click Here |
|---|
| Note: Above views are shown with Analog control.
Connection Cabling - Refer to the Dynamo Model Number Chart for choosing the correct cable
- All standard cables are 24" long
- Flying leads are supplied on customer end
- Cabling includes Control, Power, and Encoder cables
- Custom cables are available upon request. Please contact Beckwith Electronics.
|
 |
|---|
| To view the Cabling Connections Click Here |
|---|
|
|---|
| Brushless DC Gearing Selection Guide |
|---|
Beckwith Electronics will assist you in the selection of the best gearhead solution for your application.
Some factors to consider in maximizing your application system's performance: |
| Torque Multiplication | Speed Reduction | Inertia Matching |
| Radial Loading | Axial Loading | Noise |
|
|---|
| Spur gearheads will suit most needs in relatively low-torque applications. However, spur configurations have higher backlash and are usually less efficient than planetary types of similar construction. For constant velocity and unidirectional applications where backlash is less of a concern, spur gearheads are ideal.
Planetary gearheads are generally specified for their high rated torque and high input speed. Planetary gearheads are more robust with higher accuracy, lower backlash and longer life than spur gearheads. They are well suited for higher load applications in small packages ranging from nut runners and nut setters to small medical tools, pumps, and other devices. The gearhead solution (Spur Vs. Planetary) is primarily dependent upon the application. Some factors to be considered in making proper trade-offs between cost and performance are shown below. |
| Design Factors | Gearhead Type |
|---|
| Spur | Planetary |
|---|
| Torque Capacity | Lower | Higher |
| Power to Weight Ratio | Lower | Higher |
| Power to Size Ratio | Lower | Higher |
| Torque Stiffness | Lower | Higher |
| Backlash | Higher | Lower |
| Available Number of Gear Ratios | Higher | Lower |
| Operating Speed | Lower | Higher |
| Size | Larger | Smaller |
| Cost | Lower | Higher |
|
|---|
|
|---|
| Gearmotor Selection Guide |
|---|
| To construct a motor part number substitute the appropriate digits for the X's as shown below. |
|---|
 |
|---|
|
|---|
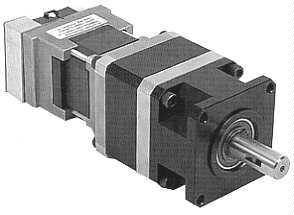
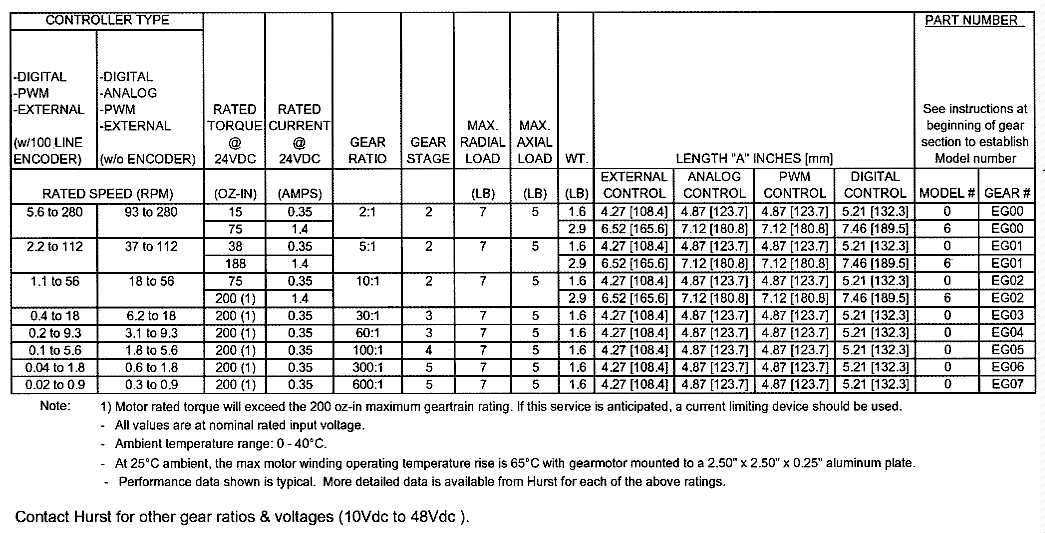
| Brushless DC with Spur Gear |
|---|
 | Features- Torque Ratings up to 200 oz-in
- Gear Ratios to 600:1
- 24Vdc Standard - For Other Voltages Consult Beckwith Electronics
- Available with Integral 'External', PWM, Analog, and Digital Motor Controls
- Ball Bearing Design
- All Gears and Pinions are Hobbed to AGMA 7 Quality
- Pinions are Extruded from a Special Steel with a Modified Long Addendum Tooth Form to Provide Higher Strength
- Extremely Compact Design
- Both Pinion and Gear Teeth are Case Hardened for Wear Resistance and Rotate on Hardened and Ground Steel Studs
|
|---|
| To view the Mechanical Motor Drawings Click Here |
|---|
| To view the Data and Specifications Click Here |
|---|
|
|---|
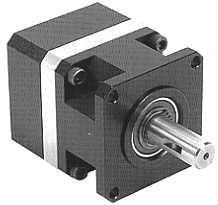
| Brushless DC Planetary Gear |
|---|
 | MM Series - High Performance - True Planetary Design
- Integrated Design
- Motor, Gearhead and Motor Control in One Compact Package
- Eliminates Extra Parts
- Improves Reliability and System Performance - Lowest Backlash Design...Less than 10 Arc. Min.
- Strong, Caged Roller Bearings
- High Shaft Loading Capacity
- High Efficiency Over 90%
- High Torque
- Viton O-Ring Sealed at Each Joint
- Sealed Ball Bearings
- All Gears are Heat Treated
- NEMA Mounting Standards
|
|---|
| To view the Mechanical Motor DrawingsClick Here |
|---|
|
|---|
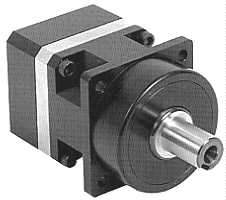
| Other Planetary Gearing |
|---|
 | JB Series - Moderate Performance Inline Planetary - True Planetary Design
- Low backlash design
- Strong, caged roller bearings
- Sealed ball bearings
- All gears are heat treated
- NEMA mounting standards
|
|---|
 | SE Series - High Performance Metric Inline Planetary - Metric and NEMA mounting available
- True planetary design
- High radial and axial shaft loading capacity
- Low start-up torque
- High torque capability
- Popular metric output shaft and front bracket design
- Low backlash design
|
|---|
 | EW Series - Precision Right Angle Planetary - True planetary design
- Tapered roller bearings
- Low backlash design
- Strong, caged roller bearings
- High shaft loading capacity
- Case hardened spiral bevel gears
- Sealed ball bearings
- All gears are heat treated
- NEMA mounting standards
|
|---|

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}